TOP > 動画館
日記等で紹介した数々の動画を一つにまとめてみました。また、掲載と書かれた文字から該当の日記へ移動することが可能です。
成功あり、失敗ありの動画をお楽しみください。m(_ _)m

再生時間:44秒 [991KB]
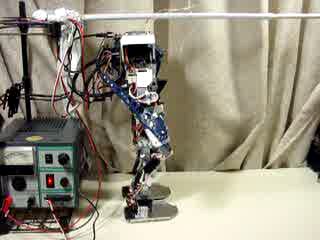
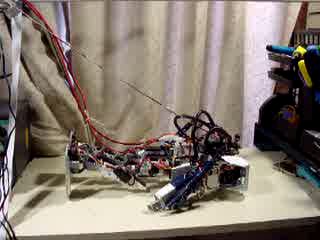
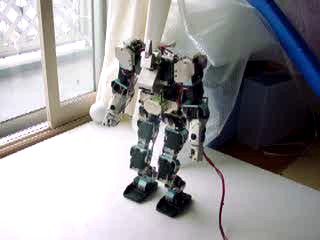
Wegweiser試作1号機が初めて屈伸をした時の映像です。曲がる時の各関節角度は、自分達が指定します。
あの時は、これなら歩けると確信していました。(^-^;
あの時は、これなら歩けると確信していました。(^-^;

 再生時間:15秒 [1.30MB]
再生時間:15秒 [1.30MB]
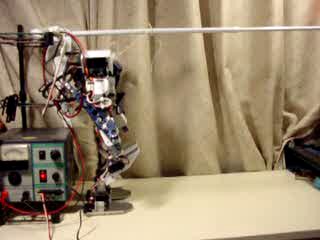
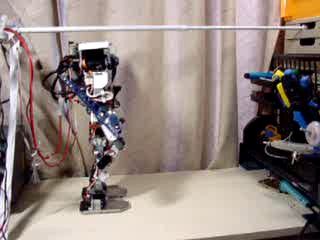
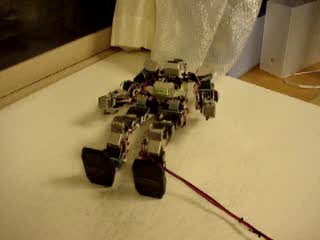
未公開の2号機映像の一つ、最初の一歩目を踏み出している映像です。今見ると、コケているようにも見えます。(^-^;
二歩目にも挑戦しますが、結局構造の問題、ソフトの問題で、歩く事ができませんでした。
二歩目にも挑戦しますが、結局構造の問題、ソフトの問題で、歩く事ができませんでした。
 再生時間:11秒 [986KB]
再生時間:11秒 [986KB]
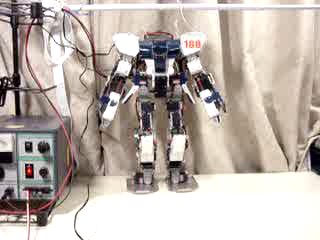
Wegweiser試作3号機が初めて屈伸をした時の映像です。大会まで時間がなかったので従来通り、各関節を指定して関節を曲げる方法を採用しています。
 再生時間:7秒 [665KB]
再生時間:7秒 [665KB]
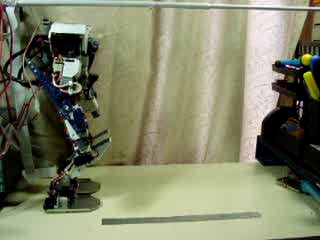
Wegweiser試作3号機の(足を回転させる)股関節に火を入れたときに、指示を出していないのに勝手に回ってしまうという異常事態の映像です。RCサーボ(S3003)の基板を交換したら、問題は解決しました。
 再生時間:12秒 [1.05MB]
再生時間:12秒 [1.05MB]
大会当日の調整時に、左足首のRCサーボが応答しなくなりました。しかも、屈伸等の動作をすると痙攣を起こすという始末。大会の時はこれで動作が全滅しました。
後に、原因はマイコンのポートが壊れた事だと分かる。ちなみに、この映像は左足首のRCサーボが生きているという証拠映像です。
後に、原因はマイコンのポートが壊れた事だと分かる。ちなみに、この映像は左足首のRCサーボが生きているという証拠映像です。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:15秒 [1.30MB]
再生時間:15秒 [1.30MB]
足の各関節を求めるのに足先軌道計算を用い、ジョイスティックが動いた分だけ足を動くようにしています。片手はデジカメで塞がっていたので、前後左右に動いている映像だけです。
 再生時間:15秒 [1.30MB]
再生時間:15秒 [1.30MB]
足の各関節を求めるのに足先軌道計算を用い、ジョイスティックが動いた分だけ足を動くようにしています。片手はデジカメで塞がっていたので、屈伸をする映像だけです。。

 再生時間:15秒 [1.30MB]
再生時間:15秒 [1.30MB]
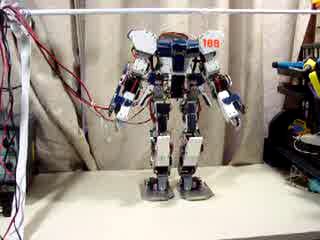
Wegweiser試作3号機の歩行成功の瞬間です。ぎこちない動きではあるけれど、確実に一歩一歩前に進んでいます。(横からの映像です。)
 再生時間:15秒 [1.30MB]
再生時間:15秒 [1.30MB]
Wegweiser試作3号機の歩行成功の瞬間です。ぎこちない動きではあるけれど、確実に一歩一歩前に進んでいます。(正面からの映像です。)
 再生時間:6秒 [602KB]
再生時間:6秒 [602KB]
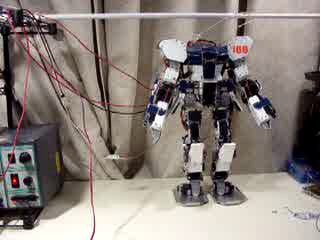
Wegweiser試作3号機の歩行が前回よりも高速で安定した歩行ができた時の映像です。
前回では、二歩目は一歩目の足よりも先に出ていませんでしたが、今回は前に出しています。これは、次の3歩目を踏み出すための布石です。
前回では、二歩目は一歩目の足よりも先に出ていませんでしたが、今回は前に出しています。これは、次の3歩目を踏み出すための布石です。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:10秒 [920KB]
再生時間:10秒 [920KB]
Wegweiser試作3号機の歩行に3歩目と最後の一歩が追加されました。動作も多少修正され、少し安定しました。(横の映像です。)
再生時間:10秒 [889KB]
Wegweiser試作3号機の歩行に3歩目と最後の一歩が追加されました。動作も多少修正され、少し安定しました。(正面の映像です。)
 再生時間:7秒 [634KB]
再生時間:7秒 [634KB]
Wegweiser試作5号機歩行試験型の歩行実験動画(前進)です。今までの試作機と比べ物にならないほど、安定した歩行と速度を実現しました。
 再生時間:7秒 [666KB]
再生時間:7秒 [666KB]
Wegweiser試作5号機歩行試験型の歩行実験動画(後退)です。今まで苦労して、悩んでいた歩行が簡単に実現してしまったので驚きました。
 再生時間:5秒 [475KB]
再生時間:5秒 [475KB]
Wegweiser試作5号機歩行試験型の歩行実験動画(横移動)です。バーニングカップに向けてモーションを作成していましたが、結局間に合いませんでした。
 再生時間:10秒 [889KB]
再生時間:10秒 [889KB]
Wegweiser試作5号機の初屈伸動画です。他の動きをやる前に、ソフトのチェックも兼ねて、最初に屈伸をやります。屈伸簡単ですしね。逆に、屈伸が苦しいのであれば、歩行等のモーションも危ういでしょう。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:6秒 [536KB]
再生時間:6秒 [536KB]
Wegweiser試作5号機の歩行前にやった足踏みモーションです。これをやっておいたことで、多少歩行がしやすくなりましたね。
一応、足は上がっているはずです。
 再生時間:6秒 [537KB]
再生時間:6秒 [537KB]
Wegweiser試作5号機の初歩行です。単純に足踏み動作+前後の動作、という訳にはいかず、多少修正しました。しかし元の動作があったので、比較的楽にできました。
 再生時間:7秒 [697KB]
再生時間:7秒 [697KB]
前回の歩行を若干スピードアップして、腕の振りを付けた歩行です。多少腕の振りが有効に働いているように見えますが、まだ完全に必要な動作であるという認識はありません。歩行速度の向上は課題の一つです。
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
うつ伏せ状態から起き上がれるモーションを作ってみました。初めてできた割にはなかなか良い動きだと思います。
立ち上がるところでグラついているので、この部分の修正が必要ですね。
立ち上がるところでグラついているので、この部分の修正が必要ですね。
 再生時間:6秒 [538KB]
再生時間:6秒 [538KB]
Wegweiser試作5号機の両腕に装備されている短剣を使用した攻撃方法の一つの突きです。参考にしたのは、昔体育の時間にやったフェンシング。
上半身はGWSのS03Tだけで構成されており、攻撃力がないため攻撃力のありそうな突きのモーションを作ってみました。
上半身はGWSのS03Tだけで構成されており、攻撃力がないため攻撃力のありそうな突きのモーションを作ってみました。
 再生時間:7秒 [667KB]
再生時間:7秒 [667KB]
前回の突きを2回連続で行う様子ですが、ペットボトルに当たったときに軌道が外れてしまい、ペットボトルを倒すことができませんでした。
原因はあたる部分の面積が小さいことにあるのは言うまでもありません。先端は丸まっており、突き刺すことはできないので安全です。
原因はあたる部分の面積が小さいことにあるのは言うまでもありません。先端は丸まっており、突き刺すことはできないので安全です。
[TOP] [製作日記] [動画館] [BBS]

 再生時間:5秒 [507KB]
再生時間:5秒 [507KB]
ふとしたことで思いつき実行したところ、この斬り攻撃でもペットボトルを倒せました。
ただ、現在のところ突きほどの攻撃力はないので、パフォーマンスで魅せるだけに留めた方がいいかもしれません。
ただ、現在のところ突きほどの攻撃力はないので、パフォーマンスで魅せるだけに留めた方がいいかもしれません。
 再生時間:9秒 [795KB]
再生時間:9秒 [795KB]
もうじき大会なので、資格審査をクリアできる横歩きを作成。ほぼ問題のない横歩きが完成。
右ができたので、あとは左に戻る動作を作らないといけませんね。
右ができたので、あとは左に戻る動作を作らないといけませんね。
 再生時間:12秒 [1.11MB]
再生時間:12秒 [1.11MB]
本戦で必要となる旋回動作を作ってみました。旋回、結構大変ですね。旋回軸にかかるトルクを甘く見ていたせいで、結構ギリギリで旋回してくれます。
初めて旋回という動作を作ったのでこんなものでしょう。次回への課題ができました。
初めて旋回という動作を作ったのでこんなものでしょう。次回への課題ができました。
 再生時間:7秒 [666KB]
再生時間:7秒 [666KB]
参加資格審査に必要な動作の一つ横歩き。実は足踏みをしていたときに横へ移動していたので、横移動を作ったという経緯がある。まだまだ荒削りなので、審査の時に転ばないようにもうちょっと調整したい。
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
全ての動作を100msecで動かした歩行。下半身の剛性がアップしたことで、上半身の揺れが小さくなり比較的楽に歩行モーションを作ることができた。
まだ、二歩だけなので調整をしながら歩数を増やして行き、参加資格の5歩になるようにする。
まだ、二歩だけなので調整をしながら歩数を増やして行き、参加資格の5歩になるようにする。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
全ての動作を120msecで動かした歩行。若干遅くなったので、調整しやすくなった。比較的安定した歩行を得る。距離は220mmくらいで、一時3A程度の電流が流れる。
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
全ての動作を120msecで動かした歩行の正面から撮った映像。正面からだと最初の重心移動がよく分かると思います。最初の重心移動以降は、ちょっとしか重心を移動していません。
 再生時間:5秒 [472KB]
再生時間:5秒 [472KB]
正面から。なぜか、こっちはほとんど回転しない。吊っているワイヤが引っ張っているせいかもしれない。ちなみに、距離は280mm~300mmくらい。回転が入っているので正確な値は不明。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
参加資格審査用の歩行(5歩)。腕を最後に振る(肩のピッチ軸を回転させるだけ)動作を入れたら回転を打ち消してくれたようだ。それでも何回かに一回は回転してしまう。
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
正面から。こちらでは回転してしまっている。ケーブルとかの関係もあるかもしれない。で、距離は320mm行きました。ひとまず、歩行はこれでいいかと思います。
 再生時間:5秒 [472KB]
再生時間:5秒 [472KB]
重心が移動しきれていない部分がある。どう解決するかが課題である。ひとまずこの状態でOKとするが、調整は必要であると感じる。
 再生時間:6秒 [569KB]
再生時間:6秒 [569KB]
参加資格審査では自分で倒れる必要がある。そのための動作。起き上がりの巻き戻しであるが、しゃがむスピードを遅くしたことで可能となった。
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
保存し忘れた横移動を作り直した。右足を上げるモーションで支えている左足を横に広げ、右足を下げてもそのまま。左足を上げてもそのまま。左足を戻すところで初めて閉じる動作を加えた。
なぜならば、左足を移動する際、移動しすぎたりバランスを崩すので、左足留めたと言うわけ。
なぜならば、左足を移動する際、移動しすぎたりバランスを崩すので、左足留めたと言うわけ。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
横移動 その3の上げ下げをコピーして歩数を増やしたもの。左足が閉じる際に、左方向へ重心移動をするように加工した。まぁ、連続でもできますということかな。歩幅が若干減るけど・・・。
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
強化型ブラケット&試作ブラケットへ換装後初めての歩行。最後止まる前の歩幅を縮めつつ停止している。急に止まろうとしたら前方へ転んだので、そうなっている。
ただ、動画を見てもらえると分かると思いますが、最後かろうじて止まっている感じ。今後歩数を増やしていくと転ぶ可能性大。まだまだ足りない。
ただ、動画を見てもらえると分かると思いますが、最後かろうじて止まっている感じ。今後歩数を増やしていくと転ぶ可能性大。まだまだ足りない。
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
今までは腕を振っていなかったが、今回から腕を振る動作を追加。基本的にはあんまり役に立っていないような感じあるが、止まる時に腕を使ったブレーキは役に立っているようだ。
どの方向に置いても倒れずに歩いてくれるが、最後の回転してしまう動きは修正しなければならない。
どの方向に置いても倒れずに歩いてくれるが、最後の回転してしまう動きは修正しなければならない。
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
横から撮影した動画。モーションを作っているときに気づいたことは、足を下ろした時の体勢が前に倒れやすい状態だと、前に倒れるようである。足を上げている時よりも、下ろしているときの方が重要。
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
新型機初の歩行モーション。今回は、胴体の軸が新たに加わった事で、前後方向の重心位置を合わせるのが比較的楽になっている。
歩行は若干遅めだが、安定するように作成してみた。これを基本歩行として、高速バージョンも作成してみたいと思う。
歩行は若干遅めだが、安定するように作成してみた。これを基本歩行として、高速バージョンも作成してみたいと思う。
 再生時間:5秒 [474KB]
再生時間:5秒 [474KB]
横から見た歩行の様子。最後の辺りで若干ぐらっと来るので、この辺りを若干補正する必要がありそう。
ジャイロを使えば問題なさそうだけど、基本のモーション自体で修正できるならば、そうしておいた方が安心だ。。
ジャイロを使えば問題なさそうだけど、基本のモーション自体で修正できるならば、そうしておいた方が安心だ。。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
新型機初の右旋回モーション。足の付け根にヨー軸があるのだが、手を抜いてます。
まぁ、いつもできていない旋回モーションがあるので、今回はそこそこペースが速いかも?
まぁ、いつもできていない旋回モーションがあるので、今回はそこそこペースが速いかも?
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
新型機初の左旋回モーション。足の付け根にヨー軸があるのだが、手を抜いてます。
まぁ、いつもできていない旋回モーションがあるので、今回はそこそこペースが速いかも?
まぁ、いつもできていない旋回モーションがあるので、今回はそこそこペースが速いかも?
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
右旋回モーション調整版。こちらはもうちょっと調整して、前回よりも早いペースで旋回しています。
旋回時の移動量を控えめにしたことで、細かく向きを変えられます。
旋回時の移動量を控えめにしたことで、細かく向きを変えられます。
 再生時間:6秒 [602KB]
再生時間:6秒 [602KB]
うつ伏せからの起き上がりモーション。手の長さがギリギリで、かなり起き上がりに苦心しました。
バランスよく起き上がってるのも時間をかけた結果であり、よく起き上がれたなぁ・・・っと。
バランスよく起き上がってるのも時間をかけた結果であり、よく起き上がれたなぁ・・・っと。
 再生時間:11秒 [990KB]
再生時間:11秒 [990KB]
仰向け→寝返り→うつ伏せ起き上がりモーション。うつ伏せ起き上がりができなかったので、うつ伏せの状態に姿勢を変更して、うつ伏せ起き上がりを行っています。
 再生時間:9秒 [794KB]
再生時間:9秒 [794KB]
資格審査では、オートで倒れてから起き上がらないといけないため、うつ伏せに倒れるモーションを作成しました。
基本的に、うつ伏せ起き上がりを逆再生すればよく、姿勢の変化時間を調整すれば難なく作れます。
基本的に、うつ伏せ起き上がりを逆再生すればよく、姿勢の変化時間を調整すれば難なく作れます。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:5秒 [471KB]
再生時間:5秒 [471KB]
ジャイロなしの状態の歩行モーション。今まで調整していた板から大会で使用する板に近い方で練習した結果、かなり転びます。
ジャイロがどれほどの効果があるか気になり、その時に実験を行ったときの映像です。
ジャイロがどれほどの効果があるか気になり、その時に実験を行ったときの映像です。
 再生時間:5秒 [473KB]
再生時間:5秒 [473KB]
ジャイロありの状態の歩行モーション。ジャイロなしの状態の歩行と全く同じモーションなのですが、ジャイロの設定のおかげで倒れなくなりました。
効果があるのは分かるんですが、どこの関節にどのくらいのゲインが必要なのか・・・っというのを探るのはなかなか大変です。
効果があるのは分かるんですが、どこの関節にどのくらいのゲインが必要なのか・・・っというのを探るのはなかなか大変です。
 再生時間:5秒 [471KB]
再生時間:5秒 [471KB]
規定演技のキャッチボールです。ボールに1個のPSDセンサが反応し、左右の腕を狭めてキャッチします。
正直、一個のPSDセンサでキャッチするのはかなり無謀でした。ロボットにキャッチさせるために人間が練習するという、本末転倒な結果に・・・。
正直、一個のPSDセンサでキャッチするのはかなり無謀でした。ロボットにキャッチさせるために人間が練習するという、本末転倒な結果に・・・。
 再生時間:4秒 [1.44MB]
再生時間:4秒 [1.44MB]
胴体を改修したロボットの高速歩行。今までの歩行よりも格段にスピードが上がっています。最後にしゃがむのは、前方への衝撃をやわらげるため。
 再生時間:3秒 [1.24MB]
再生時間:3秒 [1.24MB]
胴体を改修したロボットの高速後歩行。これも今までの歩行よりも格段にスピードが上がっています。高速歩行と比べると若干安定性にかけ、倒れやすいです。
[TOP] [製作日記] [動画館] [BBS]
 再生時間:3秒 [1.24MB]
再生時間:3秒 [1.24MB]
ちゃんと、足の付け根にあるヨー軸を使った左旋回です。高速にかつ確実に旋回できます。今回作ったモーションの中ではなかなか安定しております。
 再生時間:3秒 [1.24MB]
再生時間:3秒 [1.24MB]
ちゃんと、足の付け根にあるヨー軸を使った右旋回です。高速にかつ確実に旋回できます。今回作ったモーションの中ではなかなか安定しております。
[TOP] [別館] [動画館] [BBS]